分类
商品















 杀死队友")




")
——每天几个样式,轻松玩转CSS")


- 商品
- 店铺
- 资讯
在您的既有IT基础设备上按需构建人工智能更高效>>>
近日,Linux 社区的动荡引起了整个开源届的关注。在贡献者威胁要从操作系统中撤回代码之后,几位开源届的大人物也发表了对此事件的看法。
开源传奇人物 Eric S Raymond(ESR)主张和平处理问题,他表示:“我建议双方都退后一步,通过协商达成和解。Linux 社区应该找到一条路径,以便行为原则背后的团队和反对它的人都能有一个共同的‘目标’”。
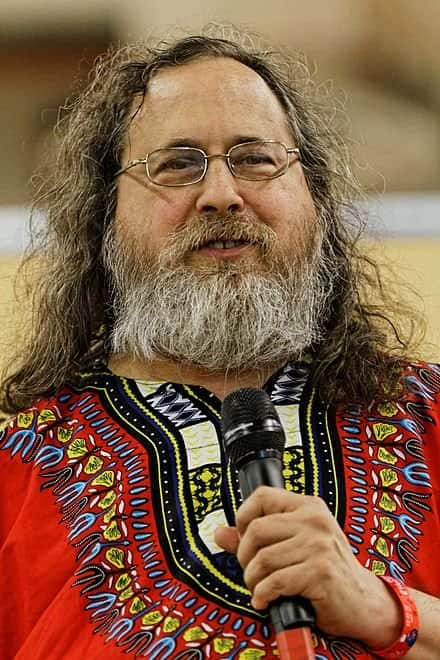
作为 GPL 许可的设计者,自由软件基金会主席 Richard Stallman(RMS)则对贡献者想要撤销代码一事做出了直接回应。他表示根据自己以及一位律师的研究,受 GPLv2 束缚,向 Linux 内核贡献代码的开发者无权撤销这些贡献。RMS 对于贡献者的这种做法十分不赞同,“假如他们真的做到了撤销代码,会有什么后果?他们会对整个自由软件社区造成伤害。”

 ¥119.25
¥119.25
官网正版 移动机器人学 数学基础 模型构建及实现方法 朗佐 凯利 轮式 运动控制 环境感知规划 传感器技术 算法 超声波 激光雷达
![移动机器人学:数学基础、模型构建及实现方法 [美]朗佐·凯利(Alonzo Kelly)移动机器人 轮式移动机器人 运动控制 环境感知](https://pic.songma.com/tmimg/20230809/e6d387b93604415994ef49fba2f1cea2-1.jpg) ¥132.75
¥132.75
移动机器人学:数学基础、模型构建及实现方法 [美]朗佐·凯利(Alonzo Kelly)移动机器人 轮式移动机器人 运动控制 环境感知
 ¥213.19
¥213.19
【正版书包邮】轮式自主移动机器人曹其新张蕾上海交通大学出版社
 ¥120.40
¥120.40
正版书籍 机电系统的智能最优自适应控制 郝明瑞 著 自适应控制方法技术应用书籍 轮式移动机器人和机械手控制中的应用通过仿真和
 ¥114.90
¥114.90
8084289|正版包邮移动机器人控制导论 软件移动机器人控制架构轮式移动机器人控制器计算机人工智能
 ¥114.80
¥114.80
轮式自主移动机器人 编程实战+自主移动机器人 2本书籍

送码官方微信





















")







 手机访问领取大礼包
手机访问领取大礼包